关键词 |
机器人定位精度检测,精度检测费用,四川精度检测,二次元精度检测 |
面向地区 |
机床的保养是怎么样的?
机床一般规定累计运行800h后,以操作人为主进行一次保养,保养工作在切断电源之后进行。下面说明镗床保养的内容和要求。
1)外保养。主要清除机床外表污垢、锈蚀,保持传动件的清洁。擦洗机床表面及罩壳,应无锈蚀无黄斑;擦洗各外露丝杠、光杠及齿条;补齐各手柄、螺钉、螺母等机件,保持机床外观整洁。
2)主轴箱及进给变速箱保养。掀开主轴箱各防尘盖板,检查调整v带和主轴箱夹紧拉杆。清洁各过滤器及油槽;检查平衡锤钢丝绳紧固情况;擦洗平旋盘滑槽及调整镶条。
3)工作台及导轨保养。擦洗工作台各处,检查调整挡铁及镶条间隙;检查导轨是否拉毛,打光毛刺并擦洗导轨。
4)后立柱保养。擦洗后轴承座、导轨面,检查调整镶条间隙。
5)润滑系统保养。清洗油毡、油槽,保持油孔和油路畅通。清洗冷却泵、过滤网及冷却箱。清洗过滤器,油杯,保持油标油窗明亮。
6)电气部分保养。清扫电气箱及电动机。检查电气装置位置,电气装置固定、安全和整齐。
操作系统,后切断电源。
机器人的检测项目有哪些?
1.守护接地试验:根据GB/T5226.1的要求执行;
2.绝缘电阻试验:根据GB/T5226.1的要求执行;
3.介电强度试验:根据GB/T5226.1的要求执行;
4.事件气温下限试验:将气温降至0℃,至少坚持30min后通电运行4钟头,应能正常事件;
5.贮存气温下限试验:将气温降至-40℃,至少坚持4后,贮存4钟头,应能正常事件;
6.事件气温极限试验:将气温升至40℃,至少坚持30min后通电运行4钟头,应能正常事件;
7.贮存气温极限试验:将气温升至55℃,存放4钟头,4钟头后降至正常大气条件,并在此条件下复原4钟头,检查外貌辐射业务标准的要求,之后通电运行,应能正常事件。
8.事件条件下恒定湿热试验:将气温调至40℃,至少坚持30min,并在1钟头内使湿度达到80%,试验时间为48钟头,在此期间通电运行,应能正常事件。
9.贮存条件下恒定湿热试验:将气温调至40℃,湿度93%,存放24小时天,在大气条件下复原12钟头,检查外貌应符合业务标准要求,之后通电运行,应能正常事件。
10.振动试验:初始和***后响应检查、定频耐久试验、扫频耐久试验、***后振动响应检查。
11.电磁兼容试验:静电、射频电磁场辐射抗扰度试验、电瞬变脉冲群、雷击浪涌冲击试验、传导抗扰度试验、工频磁场试验、电压暂降试验、传导骚扰、辐射骚扰试验,依据根据GB17799标准进行;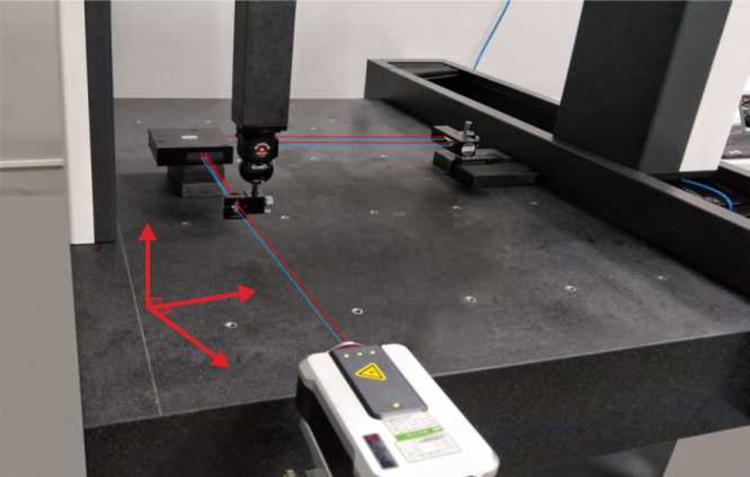
工业机器人依据的检测标准是什么?
电工电子业务基础环境试验低温试验GB/T2423.1-2008
电工电子业务基础环境试验高温试验GB/T 2423.2-2008
电工电子业务基础环境试验恒定湿热试验GB/T 2423.3-2006
电工电子业务基础环境试验振动(正弦)试验GB/T 2423.10-2008
电磁兼容都可以用标准居住、商业和轻工业环境中的抗扰度试验GB/T17799.1-1999
电磁兼容都可以用标准工业环境中的抗扰度试验GB/T17799.2-2003
电磁兼容都可以用标准居住、商业和轻工业环境中的发射GB/T17799.3-2012
电磁兼容都可以用标准工业环境中的发射GB/T17799.4-2012
服务机器人的EMC专属标准:
机器人领域的小伙伴知道CR认证,可之前申请CR认证的EMC测试标准应用的是GB/T《电磁兼容通 用标准居住、商业和轻I业环境中的抗扰度》和GB《电磁兼容通用标准居住、 商业和轻I业环境中的发射》, 这两
份标准是电磁兼容领域根据应用环境汤所给出限值的通用性标准,对于机器人的复杂运行工况,可以说,两份标准不在线。
新发布的GB/T 37284-2019《服务机器人电磁兼容通用标准发射要求和限值》和GB/T 37283-2019《服务机器人电磁兼容通用标准抗扰度要求和限值》两份标准正是为了解决测试模式和测试状态的一致性问题,
适用范围是适用于各类服务机器人,要包括个人家用服务机器人和公共服务机器人。特种机器人可以参照使用本标准。
新发布的GB/T 37284-2019《服务机器人电磁兼容通用标准发射要求和限值》和GB/T37283-2019《服务机器人电磁兼容通用标准抗扰度要求和限值》两份标准正是为了解决测试模式和测试状态的一致性问题 ,
适用范围是适用于各类服务机器人,要包括个人家用服务机器人和公共服务机器人。特种机器人可以参照使用本标准。
根据固定式和移动式区分测试状态和测试项目
1、发射标准
a)固定式服务机器人:
应在正常工作模式下进行全部项目的测试。
b)移动服务机器人:
应在充电模式、工作模式及回充寻找模式下分别进行测试,测试项目为:
1)充电模式(本体+充电器) : 谐波电流、电压波动与闪烁、传导骚扰、辐射骚扰;
2)工作模式(本体) : 辐射骚扰;
3)回充寻找模式(本体+充电器) : 谐波电流、电压波动与闪烁、传导骚扰、辐射骚扰。
2、抗扰度标准:
1 )移动服务机器人:
应在充电模式、工作模式和回充寻找模式状态下分别进行测试,测试项目为: .
--充电模式(机器人本体连接充电器) : 适用的全部测试项目;
--回充寻找模式:适用的全部测试项目
--工作模式(机器人本体) :工频磁场、射频电磁场、静电放电。
工作模式测试状态:服务机器人应在以绝缘支架支撑底部确保机器人悬空的状态下,以60% ~ 80%的高速度或典型速度进行试验,选择典型速度。
2 )固定式服务机器人: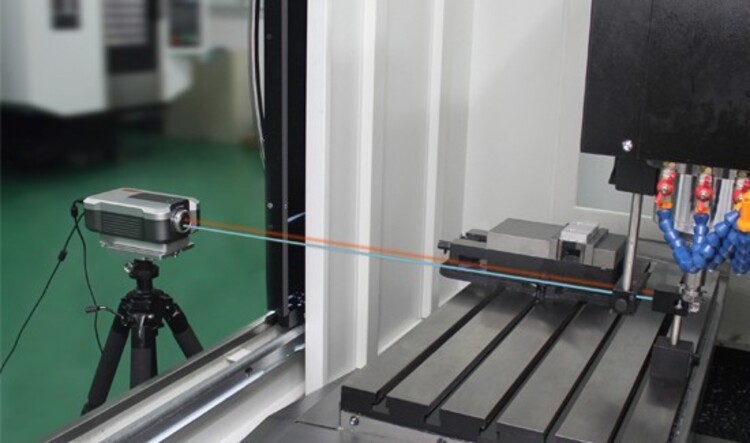
机器人检测的背景技术:
在机器人的研发、制造上,尤其是工业机器人,我国与工业发达国家的差距较大,主
要表现在关键零部件基础薄弱、可靠性和精度不高。
重复定位精度作为机器人的一项重要的技术参数,其测量是机器人出厂前的必检项目
之一。
目前,测量机器人重复定位精度检测设备主要有激光跟踪仪和三坐标测量仪。其中,
激光跟踪仪测量实施过程简单、测量精度高,但是设备昂贵, 不是大部分中小企业所
负担得起的。另外,测量过程中,激光需要一-直跟踪机器人末端的靶球 ,机器人运动
速度不能很高,否则容易出现断光。而三坐标测量仪测量实施过程中,机器人与三坐
标测量仪之间需要进行动作协调,否则容易造成干涉,损坏测量仪,操作比较繁琐,
设备也比较昂贵。